
Robot Skill Generalization via KIS-GMM
Abstract
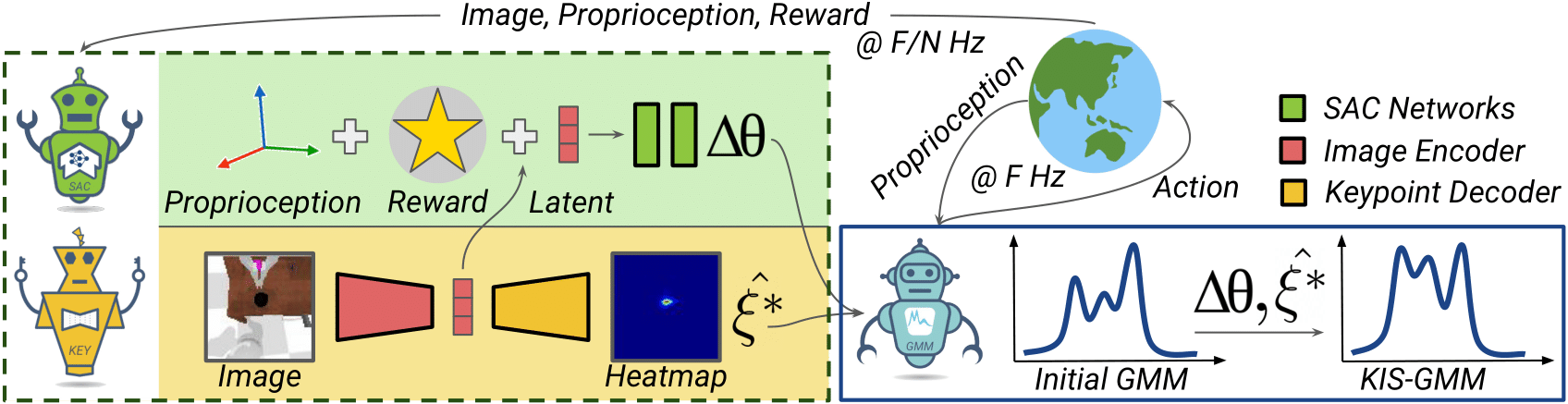
A long-standing challenge for a robotic manipulation system operating in real-world scenarios is adapting and generalizing its acquired motor skills to unseen environments. We tackle this challenge employing hybrid skill models that integrate imitation and reinforcement paradigms, to explore how the learning and adaptation of a skill, along with its core grounding in the scene through a learned keypoint, can facilitate such generalization. To that end, we develop Keypoint Integrated Soft Actor-Critic Gaussian Mixture Models (KIS-GMM) approach that learns to predict the reference of a dynamical system within the scene as a 3D keypoint, leveraging visual observations obtained by the robot’s physical interactions during skill learning. Through conducting comprehensive evaluations in both simulated and real-world environments, we show that our method enables a robot to gain a significant zero-shot generalization to novel environments and to refine skills in the target environments faster than learning from scratch. Importantly, this is achieved without the need for new ground truth data. Moreover, our method effectively copes with scene displacements.
Approach
We introduce the Keypoint Integrated Soft Actor-Critic Gaussian Mixture Models
(KIS-GMM), a robot learning framework specifically crafted for fostering adaptive and
generalizable robot skills. This framework is segmented into two distinct phases:
1. In the first phase, a robot skill is acquired by learning a parameterized dynamical system
from a few demonstrations within a single source environment. This stage masters the
skill not only by adapting dynamical system parameters through physical interactions,
high-dimensional sensory data, and sparse rewards but also by deriving a pivotal
keypoint crucial for grounding the skill in the scene.
2. In the second phase, the dynamical
system is generalized to unseen environments that share structural similarities to the
source environment by transferring the learned keypoint, conducting any necessary
refinements to either the skill policy or keypoint detection if required.
Experiments
In the real-world experiment, we examine Door Opening and Drawer Opening skills. First we pursue to master learned skills in a source environment
The baseline skill models, lacking awareness of the dynamical system’s reference point in target environments, struggle to anchor the skill to these new contexts, leading to an inability to generalize the learned skill effectively.
KIS-GMM learns to identify a 3D keypoint representation that grounds the skill’s dynamical system in novel scenes. Below you see that our model employs the wrist camera observation to infer a keypoint surrounding door and drawer handles in unseen environements.
KIS-GMM successfully opens four visually distinct doors and drawers in the real world, having been initially trained on just one of each, respectively.
Publications
Robot Skill Generalization via Keypoint Integrated Soft Actor-Critic Gaussian Mixture Models Iman Nematollahi*, Kirill Yankov*, Wolfram Burgard, Tim Welschehold arxiv Pdf
BibTeX citation
@inproceedings{nematollahi23iser,
author = {Iman Nematollahi and Kirill Yankov and Wolfram Burgard and Tim Welschehold}
title = {Robot Skill Generalization via Keypoint Integrated Soft Actor-Critic Gaussian Mixture Models},
booktitle = {Proceedings of the International Symposium on Experimental Robotics (ISER)},
year = {2023},
url={http://ais.informatik.uni-freiburg.de/publications/papers/nematollahi23iser.pdf},
address = {Chiang Mai, Thailand}
}
Robot Skill Adaptation via Soft Actor-Critic Gaussian Mixture Models Iman Nematollahi*, Erick Rosete-Beas*, Adrian Röfer, Tim Welschehold, Abhinav Valada, Wolfram Burgard arxiv Pdf
BibTeX citation
@inproceedings{nematollahi22icra,
author = {Iman Nematollahi and Erick Rosete-Beas and Adrian Roefer and Tim Welschehold and Abhinav Valada and Wolfram Burgard},
title = {Robot Skill Adaptation via Soft Actor-Critic Gaussian Mixture Models},
booktitle = {Proceedings of the IEEE International Conference on Robotics and Automation (ICRA)},
year = {2022},
url={http://ais.informatik.uni-freiburg.de/publications/papers/nematollahi22icra.pdf},
address = {Philadelphia, USA}
}



